In this course, we will try to replicate the following demo:
While it might seem like a simple line-follower project, it actually requires quite a few tricks and requires most of the features that ROS2 provides, like:
- How to compile a ROS workspace.
- Writing modular nodes, each having several publishers/listeners.
- How to setup a package and specify which files are executable.
Here is the rqt_graph of the demo:
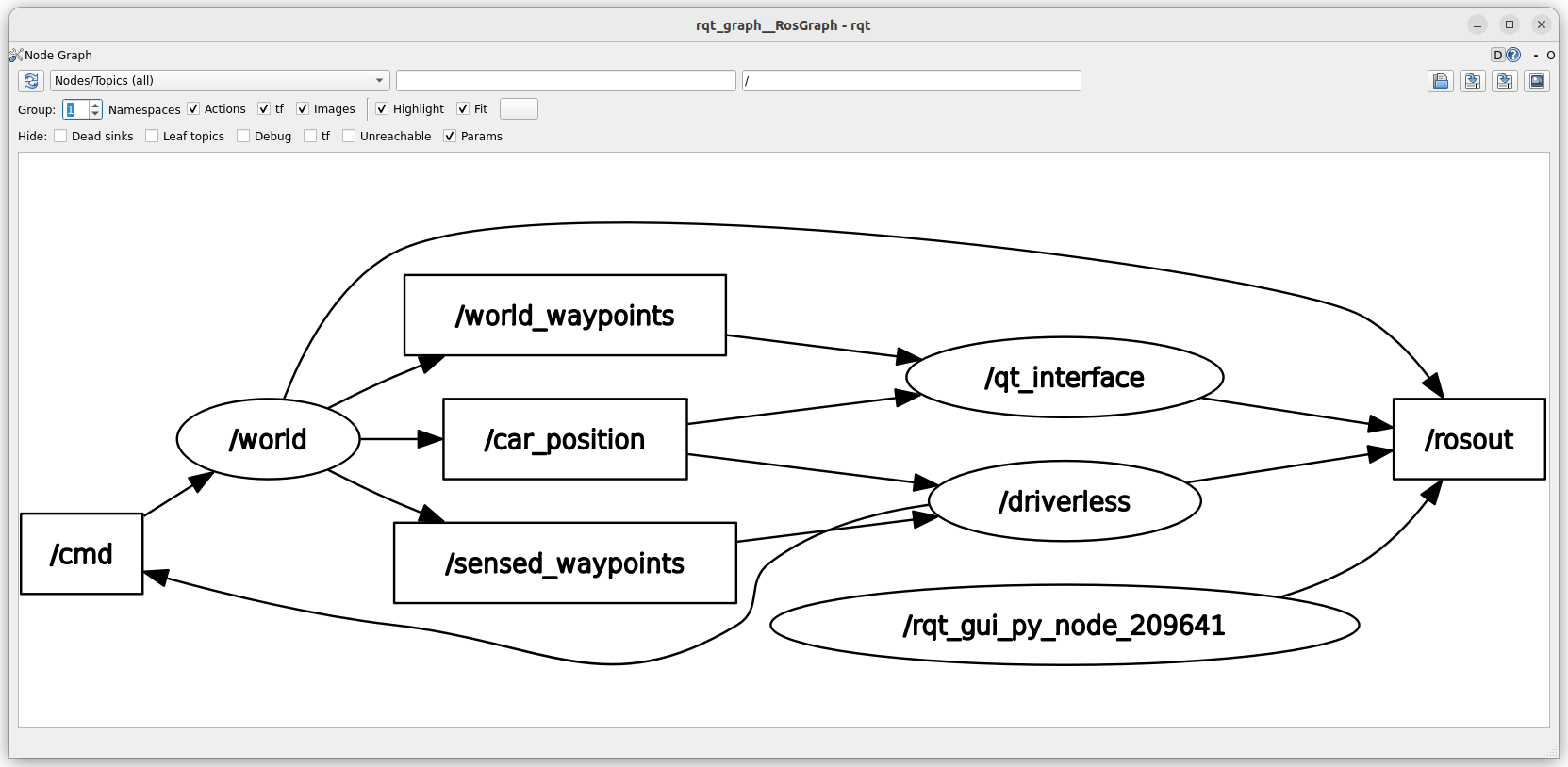
As we can see, it’s actually not that simple.